Lately, there’s been a real spike in the demand for precise motion tracking across all kinds of industries. Big names like Bosch and STMicroelectronics have been talking about how the market for motion sensors is booming. By 2022, it’s estimated that the global market for inertial measurement units – you know, IMUs – is going to hit around $8.2 billion by 2026. A key player fueling this growth is Imu Inertial Measurement.
Basically, IMUs give us vital info on acceleration, angular velocity, and orientation. That data is super important for tons of stuff — everything from airplanes to our favorite gadgets at home. But, let’s be honest, there are still some hurdles. Getting pinpoint accuracy isn’t always easy because environmental factors can mess with measurements, causing noise and drift. That’s why lots of companies are pouring resources into smarter algorithms to interpret the data better.
Even with all these advancements, it’s still not a done deal. There are questions about how well IMUs can adapt to all kinds of environments. Like, how do you maintain accuracy in extreme conditions? And on top of that, integrating IMU tech with other systems often raises uncertainties. Many folks also find it tough to fully use the potential of Imu Inertial Measurement — mostly because of a lack of knowledge or technical headaches. Gaining a deeper understanding is really key if we want to make the most of what this technology can do.

Understanding IMU: What is Inertial Measurement Unit?
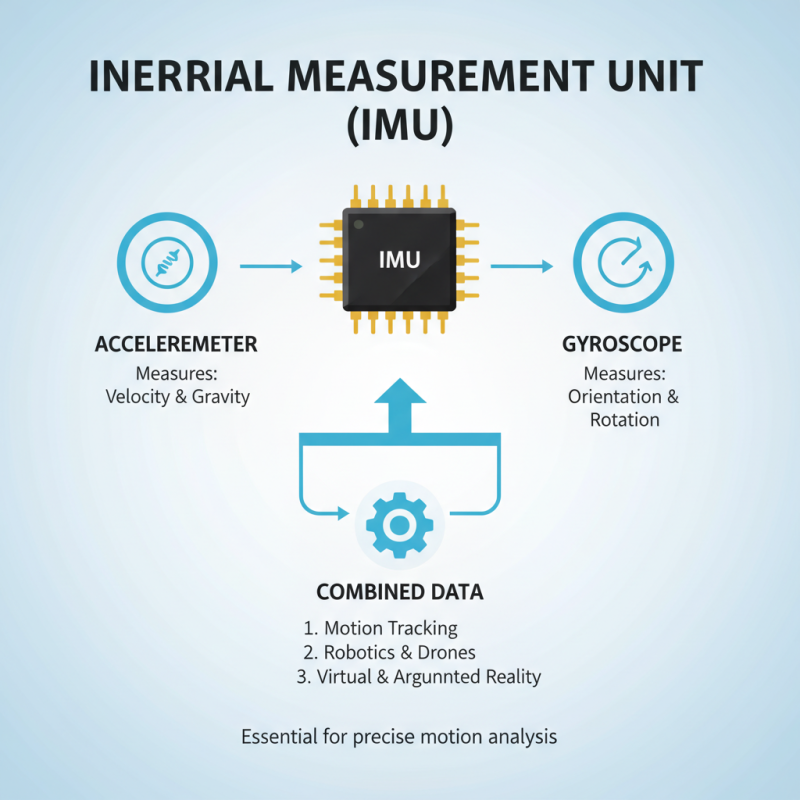
An Inertial Measurement Unit (IMU) is a crucial device for motion tracking. It typically consists of accelerometers and gyroscopes. These components help measure velocity, orientation, and gravitational forces. When combined, they provide valuable data for various applications, from robotics to virtual reality.
IMUs can capture rapid movements with high precision. They work by detecting changes in motion over time. However, they may suffer from drift or noise, leading to inaccuracies. Regular calibration is essential to maintain reliable performance. Users should evaluate the environment before deployment. Surfaces and external forces can affect readings.
**Tips:** Keep your IMU calibrated regularly. Ensure it operates in stable conditions. Try to minimize interference from magnetic fields or vibrations. This can enhance the accuracy of your data. Remember, no system is perfect. Continuous monitoring and adjustment are vital for optimal performance.
Components of IMU: Accelerometers, Gyroscopes, and Magnetometers
In motion tracking, Imu Inertial Measurement Units play a crucial role. These devices typically consist of three main components: accelerometers, gyroscopes, and magnetometers. Each part contributes uniquely to measuring movement and orientation.
Accelerometers detect changes in velocity. They measure linear acceleration. This helps in determining the speed and position of an object. Gyroscopes track rotational movement. They sense orientation changes effectively. Together, they provide comprehensive data about an object's motion.
Magnetometers add another layer. They measure magnetic fields. This helps in establishing a reference direction, improving the accuracy of tracking. However, using IMU isn't always straightforward. Factors like environmental interference can affect readings. Incorrect calibration can lead to errors, prompting reflection on data quality. Understanding these components enhances effective motion tracking. It's vital to evaluate their integration carefully.
IMU Sensor Data for Motion Tracking
This chart illustrates the sensor readings from an Inertial Measurement Unit (IMU). The data includes accelerometer, gyroscope, and magnetometer values over a specified time period. Each bar represents the readings in their respective units, showcasing how these values change during motion.
Principles of Motion Tracking: How IMUs Measure Movement
In the world of motion tracking, Inertial Measurement Unit (IMU) sensors play a crucial role. They measure movement through accelerometers and gyroscopes. These components detect changes in velocity and orientation. As a result, they provide data that helps track motion accurately. IMUs can be found in various applications, such as virtual reality and robotics, allowing devices to understand their position in space.
When using IMUs, consider placement. Positioning can affect accuracy. Sensors should be securely attached to the object in motion. A poorly placed sensor may produce unreliable data. Calibration is also vital. Regularly check the sensor's alignment to maintain precision. This helps in achieving consistent results.
Tips: Ensure the IMU is level during the initial setup. This can help avoid drift in measurements. Test the setup under controlled conditions before real-world application. Monitoring environmental factors, such as temperature, is essential. Extremes can impact sensor performance. By understanding these elements, you can enhance the effectiveness of the
Inertial Measurement Unit Imu Sensor in your projects.
Data Processing: Filtering and Sensor Fusion Techniques
Data processing plays a critical role in utilizing
Imu Inertial
measurement for motion tracking. Filtering is one common technique to reduce noise. Noise can come from various sources, such as vibrations or electronic interference.
Effective filtering techniques help clean the data. For instance, low-pass filters can smooth out abrupt movements.
However, over-filtering may cause loss of important motion details. The balance here is tricky.
Sensor fusion is another vital approach in enhancing motion tracking accuracy. By combining data from multiple sensors, we can build a more comprehensive motion model.
For example, an accelerometer might tell us about speed changes. Meanwhile, a gyroscope gives angle rates.
Joining these insights helps create a more accurate representation of movement. Yet, sensor fusion can introduce complexity.
The algorithms need fine-tuning. Sometimes, they may not yield the expected results in all environments.
Improper calibration of sensors can lead to inaccuracies. Regular checks are essential to maintain precision.
Sometimes, even slight misalignments can significantly affect tracking quality. The challenge lies in continuously refining methods for success.
Each motion scenario can vary, and adaptability is key. Ultimately, understanding these concepts can lead to improved motion tracking,
but the journey requires patience and thoughtful adjustments.
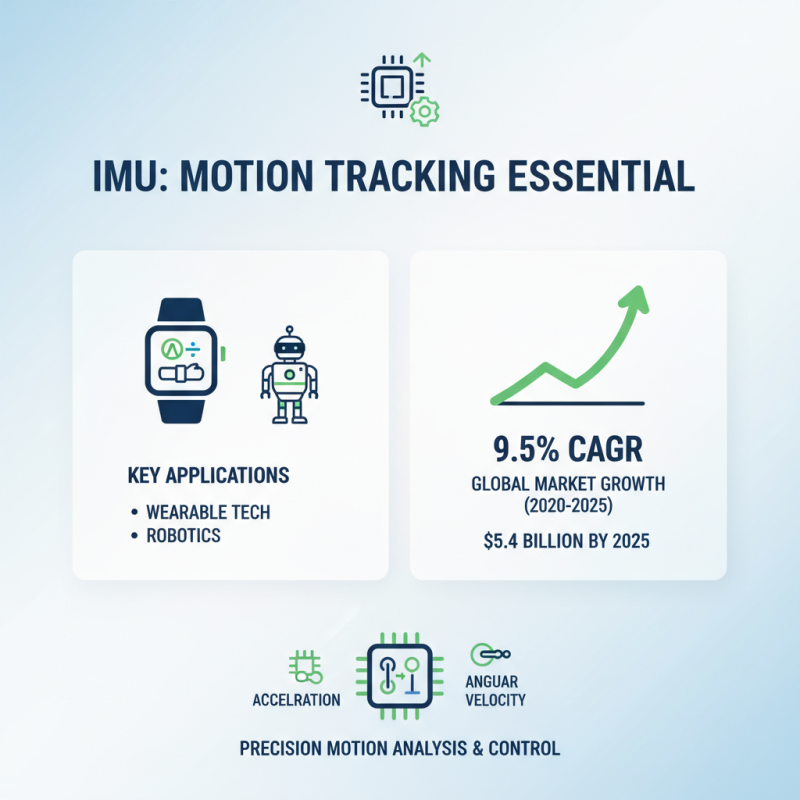
Applications of IMU: From Wearable Tech to Robotics
Inertial Measurement Units (IMUs) are essential tools across various sectors, notably in wearable technology and robotics. These devices accurately track motion by measuring acceleration and angular velocity. According to a report by ResearchAndMarkets, the global IMU market is expected to grow by 9.5% annually, reaching $5.4 billion by 2025. This growth highlights the increasing reliance on IMUs for precision in motion analysis and control.
Wearable devices, especially health trackers and smart sports equipment, extensively use IMUs. They help monitor physical activity in real-time, offering insights into movement patterns. A study published in the International Journal of Sports Medicine found that athletes using IMUs improved performance by 15%. However, the data can be skewed if the sensors are not properly calibrated. This inaccuracy can mislead users about their physical capabilities.
In robotics, IMUs enhance navigation and stability. Autonomous drones, for instance, utilize IMUs for flight stability. A report from Technavio indicates that IMUs in drones could increase by over 7% yearly. However, challenges remain in integrating IMUs with other sensors, like GPS, which sometimes provide conflicting data. This lack of coordination can pose risks in critical applications, urging developers to refine their algorithms and sensor fusion techniques for better outcomes.
Challenges in Motion Tracking: Calibration and Drift Issues
Calibration is a critical aspect of using Imu Inertial Sensors for motion tracking. Calibration ensures that the sensor readings are accurate and reliable. However, this process can be challenging. Small errors during calibration can lead to significant drift over time. This drift affects motion tracking accuracy, leading to unreliable data.
To mitigate calibration issues, perform regular checks on your IMU inertial sensor. It helps in detecting drift early. Adjust the sensor’s parameters based on your findings. Use a controlled environment for calibration. This reduces outside influences that might skew the results.
Drift issues aren't easy to solve. Continuous monitoring is essential. Understanding the environment is key. Rapid changes in temperature or magnetic fields can alter sensor performance. Regular maintenance and recalibration can help keep motion tracking precise.
Tips: Always document your calibration settings. This will help track changes over time. Use stable reference points for better accuracy. Lastly, be patient. It's an iterative process that often requires fine-tuning. Remember, each adjustment brings you closer to accuracy.
How to Use Imu Inertial Measurement for Accurate Motion Tracking? - Challenges in Motion Tracking: Calibration and Drift Issues
| Challenge |
Description |
Potential Solutions |
| Calibration |
Inaccurate calibration can lead to significant errors in motion tracking. |
Regular calibration procedures and using reference points can improve accuracy. |
| Drift |
Accumulated errors over time that can lead to deviations from the true position. |
Implementing sensor fusion techniques with GPS or vision systems can mitigate drift. |
| Noise |
Random errors from the environment can affect sensor readings. |
Applying digital filters and signal processing techniques may reduce noise impact. |
| Latency |
Delay between sensor data collection and output can lead to lag in motion response. |
Using high-speed sensors and optimizing data processing algorithms can help. |
Future Trends: Innovations in IMU Technology for Enhanced Tracking
Innovations in Inertial Measurement Units (IMUs) are transforming motion tracking. Advanced algorithms and sensors are enhancing accuracy. These new technologies promise to reduce latency and improve performance in real-world applications. For instance, motion capture in gaming is becoming seamless.
Wearable devices equipped with IMUs are now more precise than ever. The miniaturization of sensors plays a significant role. They fit comfortably on the user's body while providing accurate data. However, challenges remain. Battery life often limits ongoing tracking. Furthermore, environmental factors can interfere with performance.
The future looks promising with research focused on addressing these issues. Integration with artificial intelligence could refine motion tracking further. This could lead to applications in healthcare and sports training. Yet ongoing testing is crucial to validate these advancements. Improvements need feedback from real-world use to ensure reliability.
Advancements in UAVs Navigation: A Comprehensive Analysis of the BSD98's Impact on Lightweight Inertial Navigation Systems
The advancements in Unmanned Aerial Vehicles (UAVs) navigation systems have significantly transformed the landscape of precision navigation, especially with the integration of advanced technologies like inertial navigation systems (INS). Among these technologies, the use of fiber-optic gyroscopes has emerged as a game-changer, particularly in lightweight applications. Recent studies show that systems utilizing digital closed-loop technology can achieve zero-bias stability ranging from 0.01°/h to 0.05°/h with appropriate smoothing techniques, which is essential for maintaining accuracy in dynamic environments.
The lightweight and compact design of state-of-the-art inertial navigation units enhances their adaptability in urban and rugged terrains. For instance, high-performance fiber-optic gyroscopes are engineered to withstand extreme conditions, exhibiting remarkable resistance to vibration and shock. This robustness, coupled with their rapid startup capability, makes them particularly suitable for vehicle-mounted positioning and high-precision applications in UAVs. According to industry reports, the demand for reliable navigation solutions in UAVs is projected to grow significantly, with estimates suggesting a compound annual growth rate (CAGR) of over 10% through the upcoming decade as industries increasingly adopt automation and autonomous technologies.
Incorporating advanced inertial navigation systems into UAV platforms not only improves the accuracy of navigational data but also enhances operational efficiency. The versatility and precision of these systems enable UAVs to perform complex tasks such as surveying, mapping, and surveillance autonomously. With the ongoing development in navigation technologies, the implications for operational capabilities are profound, paving the way for innovations across various sectors, including logistics, agriculture, and environmental monitoring.
FAQS
: The product aims to improve daily life. It offers various functionalities. Users often report convenience and satisfaction.
It is suitable for a wide range of users. Children, adults, and seniors can all benefit. However, supervision may be required for younger users.
Generally, yes, it is user-friendly. However, some may find it challenging initially. Guidance or tutorial may help.
Regular cleaning is essential for optimal performance. Follow the instructions provided for care. Neglect can lead to deterioration.
Yes, users should read the safety guidelines. Avoid using near water sources. Improper use could lead to accidents or damage.
Check the manual for troubleshooting tips. If issues persist, contacting customer support may be necessary. Patience is key during this process.
Conclusion
The article delves into the significance of IMU Inertial Measurement Units in precise motion tracking. It starts by explaining what an IMU is and its essential components, including accelerometers, gyroscopes, and magnetometers, which collaboratively measure movement. The principles of motion tracking highlight how these devices function effectively to capture spatial orientation and acceleration.
Additionally, the article covers the critical aspect of data processing, focusing on filtering and sensor fusion techniques that enhance the accuracy of measurements. It explores various applications of IMUs, ranging from wearable technology to robotics, showcasing their versatility. However, it also addresses challenges such as calibration and drift issues, which need to be overcome for optimal performance. Finally, the discussion shifts to future trends, emphasizing innovations in IMU technology that promise to improve motion tracking capabilities even further.
 TBSD60
TBSD60 BSD120
BSD120 BSD98
BSD98 BSD70
BSD70 BSD60
BSD60 BSD50
BSD50 BSD217
BSD217 INS1700
INS1700 INS970
INS970 INS570
INS570 INS170
INS170 SLA-4B1L1-65
SLA-4B1L1-65 SLA-4B1L1-130
SLA-4B1L1-130 SLA-8B1L1-165
SLA-8B1L1-165 DIVER 101
DIVER 101 DIVER 102
DIVER 102 DIVER 103
DIVER 103 DIVER 104
DIVER 104 DIVER 105
DIVER 105 DIVER 106
DIVER 106 SLLR3000
SLLR3000 SLLR905
SLLR905 SLLD25
SLLD25 160M
160M 170M
170M SLFC-70
SLFC-70 SLAF280
SLAF280 MR360
MR360